本文是CSK与KCF算法推导的第三篇,主要介绍算法的主体部分推导。
循环矩阵
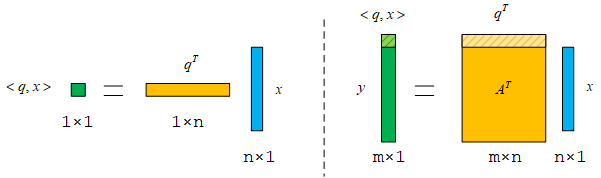
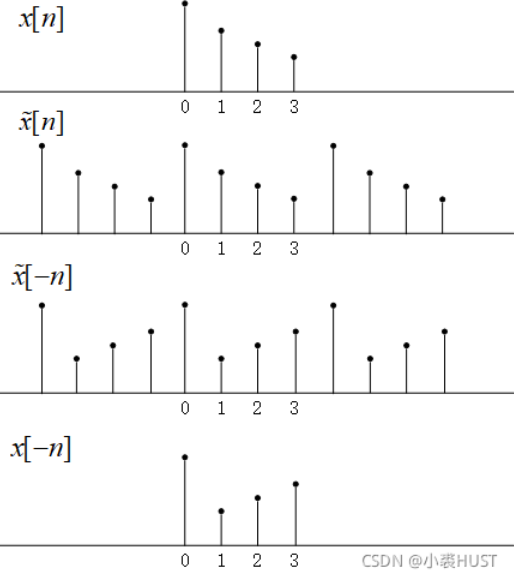
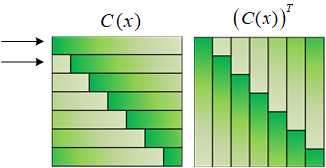
循环矩阵从CSK的文章里就提出了,概念也很容易理解。一个样本x,可以通过循环移位生成不同的向量,组合成一个矩阵C(x)。下面的图里分别列出了x、C(x)和C(x)的转置。
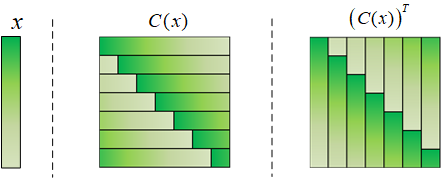
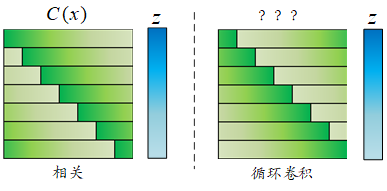
循环矩阵C(x)和另一个列向量z相乘,得到的结果就是x和z进行相关运算的结果。这个也很好理解,就是x在z上面滑动,然后进行乘加运算。同样可以写出循环卷积的矩阵表达式,循环卷积需要先将x倒序,然后再滑动。对比循环卷积所用的矩阵和(C(x))T的颜色,可以发现它们俩是一样的!
循环矩阵C(x)既然能和循环卷积联系起来了,那么自然可以想到把DFT矩阵也联系起来。这就能得出一个重要的结论:循环矩阵C(x)能够用DFT矩阵对角化!
下面是证明过程。先根据时域卷积等于频域乘积写出等式:
(C(x))Tz=x∗z=F−1(x^⊙z^)
其中“⊙”是哈达玛积(Hadamard product),或者称为“element-wise product”,表示两个向量对应位置的分量直接相乘。x^和z^分别表示x和zDFT变换之后的序列。
(C(x))Tz=s1FH(x^⊙Fz)=s1FHdiag(x^)Fz
两个列向量的哈达玛积可以转换成对角矩阵和列向量相乘。diag(x^)表示把x^放到对角线上形成对角矩阵。因为上式对所有的z都成立,所以可以去掉z,得到:
(C(x))T=s1FHdiag(x^)FC(x)=(s1FT)diag(x^)(s1F∗)
又因为F=FT,且U=s1F是酉矩阵。C(x)可以进一步表示为:
C(x)=Udiag(x^)U∗
这个结论就非常厉害了。所有循环矩阵都可以特征分解,特征值是原始序列的DFT;所有循环矩阵的特征向量都相同。这就为后面的运算带来了很大的便利。
上面的推导是从循环卷积的角度出发的,而我在第一篇文章中还写了相关运算与DFT的关系。
这里的相关运算相当于是x相对于z在向右滑动,所以x的DFT结果需要取复共轭,可以这样表示结果:
C(x)z=x⋆z=F−1(x^∗⊙z^)
其中⋆表示相关运算,经过类似的推导之后可以得到:
C(x)=U∗diag(x^∗)U
循环移位的意义
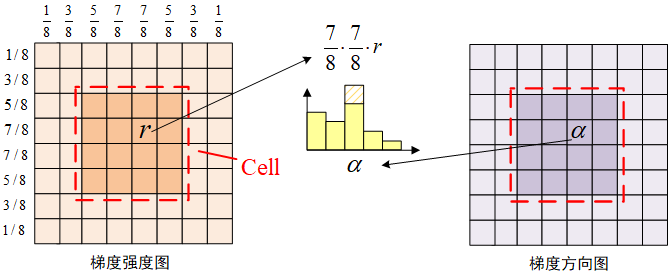
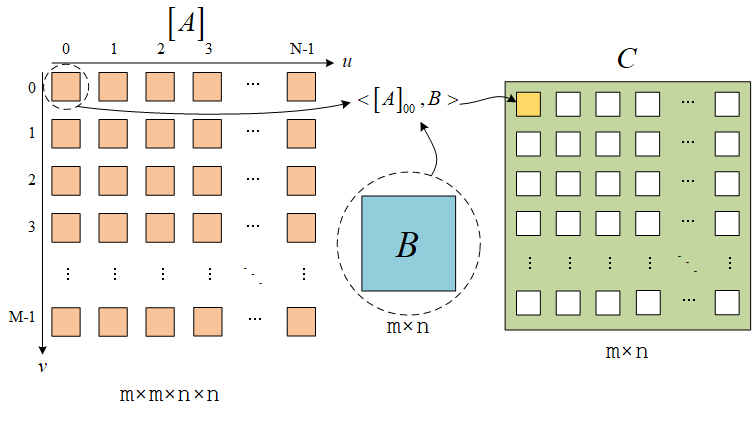
一方面原因已经在上面推导,循环矩阵能够用DFT对角化。另一方面要清楚输入样本x并不都是我们关心的目标。我们关心的Target只有其中的一部分,就如下面的图所示。
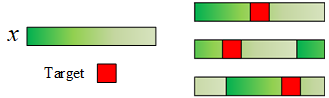
这么做就能够在训练的时候为我们关心的Target提供一些上下文(context)信息。x在循环移位的过程中确实起到了“密集采样”的作用。
生成标签
在生成标签的时候我们可以给原始样本x一个较大的标签值,其他由循环移位产生的样本给较小的标签值,相对位移越大,标签值越小。
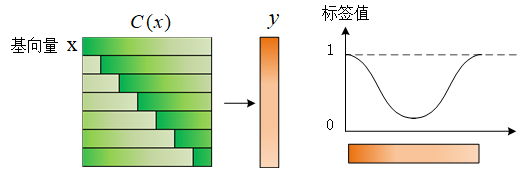
因为是循环移位,所以移位越接近一个周期,这个样本越接近正样本。所以样本的标签值是一个峰值在两侧的高斯函数。
训练(不带核函数)
样本训练还是用的岭回归。结合第二篇文章,虽然在引入核函数之后,我们就不关心ω是多少了,但在没有引入核函数的时候,能求出ω自然更好。
ω=(XTX+λI)−1XTy
只需要将样本矩阵X替换成C(x)即可。上面的表达式里用的是转置而不是共轭转置,因为我们前面的推导是在实数的条件下得到的,因为这对于我们分析问题来说已经足够了。
有人可能会担心,C(x)分解之后的三个矩阵都是复矩阵,这里是不是应该用共轭转置啊?要用共轭转置很简单,把前面岭回归的推导用共轭转置推导一遍就行,这里的转置是可以推广到共轭转置的。但其实也可以就只用转置,因为这里的C(x)本质上还是实数矩阵,转置是能够成立的。我们已经在前面已经有两个关于C(x)的分解了,可以都用来帮助化简。把X=C(x)代入:
ω=(UTdiag(x^∗)UHUdiag(x^)U∗+λI)−1UTdiag(x^∗)UHy
把握几个关键点,UHU=UUH=U∗U=UU∗=I;对角矩阵相乘就是对角线上元素的对应相乘;对角矩阵转置就是对角线上元素求倒数;(ABC)−1=C−1B−1C−1;Ux=x^/s;U∗x=x^∗/s。
ω=(UTdiag(x^∗)UHUdiag(x^)U∗+λI)−1UTdiag(x^∗)UHy =Udiag(x^∗⊙x^+λ1)U∗Udiag(x^∗)U∗y =Udiag(x^∗⊙x^+λx^∗)U∗y
这里diag里面的计算都是element-wise的。
U∗ω=diag(x^∗⊙x^+λx^∗)U∗y
ω^∗=x^∗⊙x^+λx^∗⊙y^∗
最后的化简结果如下。相比于原先复杂的矩阵运算,现在只需要少量DFT、IDFT和element-wise的运算即可。
ω^=x^∗⊙x^+λx^⊙y^
这个地方的推导也是知乎上有人提出推导有误的地方。原文中的结果里面分子的x^多了复共轭,因为在原文的公式(55)处落下了一个复共轭。而这部分结果作者也没有用到具体算法中,所以对算法没有影响。
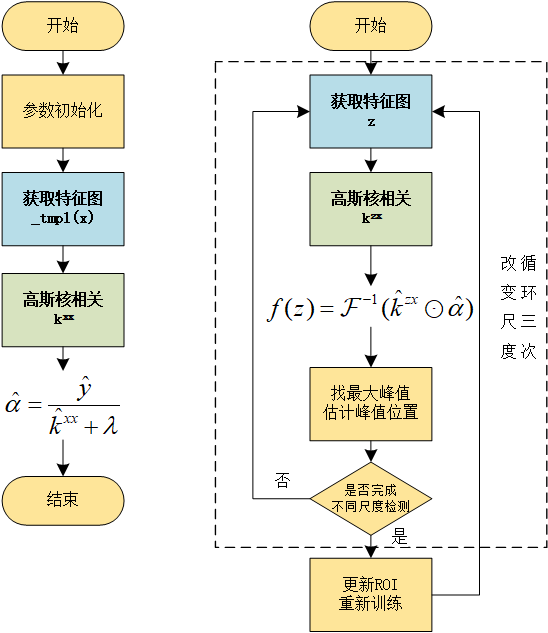
训练(带核函数)
带核函数的情况下,我们就不用求ω了,只要求中间变量α就好了。
α=(K+λI)−1y
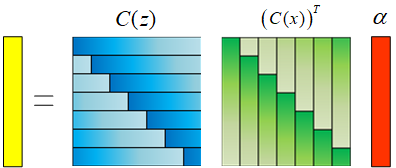
计算Gram矩阵
逐行观察上面的矩阵乘法,就看前两行就行。可以发现这两行的结果也是一个相对移位的关系。所以当样本矩阵是循环矩阵的时候,这一组样本的Gram矩阵也会是循环矩阵。而循环的基向量就是Gram矩阵的第一行。K是高维空间的Gram矩阵,这一结论自然也成立,K也是一个循环矩阵。
K=C(kxx)kxx=[κ(x,P0x)κ(x,P1x)κ(x,P2x)⋯κ(x,Pnx)]
这里的P矩阵的作用是让列向量φ(x)循环移位。比如P0是不移位,P1是循环移位1次,P2是循环移位2次,以此类推。
α=(C(kxx)+λI)−1y=(Udiag(k^xx)U∗+λI)−1y
U∗α=diag(k^xx+λ1)U∗y
α^∗=k^xx+λy^∗
用循环矩阵的形式表示K,然后特征分解,利用对角矩阵和酉矩阵的特性即可完成上面的化简。这时候计算量相对比较大的地方就是求kxx了,它是向量x和x的循环移位的向量在高维空间的内积构成的向量。
然后对上面的等式两边取复共轭,就可以得到:
α^=k^xx∗+λy^
但这和论文里的结论不一样,论文里的结论,分母的k^xx没有取复共轭。但实际上这里取复共轭或者不取复共轭都行,因为k^xx是实数。
什么样的实数序列做DFT之后还能是实数?观察旋转因子WNkn,旋转因子在复平面上的分布就是有对称性的,当实数序列满足一定条件之后,虚部就能够抵消。
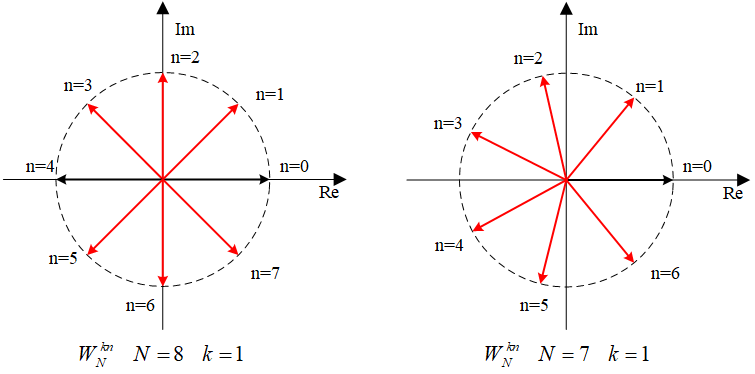
观察可以发现,只要序列满足x[i]=x[N−i] i=1,2,...,N−1这个条件,这些旋转因子的虚部就都能够被抵消。对于二维的图像来说,就是我们不关心它的第0行和第0列,第0行和第0列可以是任意实数,然后剩余的数据是中心对称的就可以。
序列x的自相关kxx自然就满足这一条件。所以更一般的结果还可以是:
α^=real(k^xx)+λy^
我们还可以让结果更简单,就是如果y给定的标签同样满足上面的条件,那么y^就也是一个实数。这样整个α^也是实数了!!
α^=real(k^xx)+λreal(y^)
通过上面的计算,我们还可以想到一个结论,K=C(kxx)不光是一个循环矩阵,也还是一个对称矩阵,K=KT。结合这一结论我们可以重新进行一次推导:
α=(KT+λI)−1y
α=(C(kxx)T+λI)−1y=(U∗diag(k^xx)U+λI)−1y
Uα=diag(k^xx+λ1)Uy
α^=k^xx+λy^
这样就能直接得到论文中给出的结论。
带核函数的检测
检测就是我们的训练完成之后送进一个新的样本z来预测输出。不带核函数的情况下因为直接计算出了ω,所以只需要求ω和z的内积就能得到结果。带核函数的情况在上一篇文章中介绍了,不需要显式地求出ω,只需要将输入样本z和所有训练样本做内积,得到一个维度是样本个数的列向量,然后把这个列向量和α做内积即可得到一个预测结果。
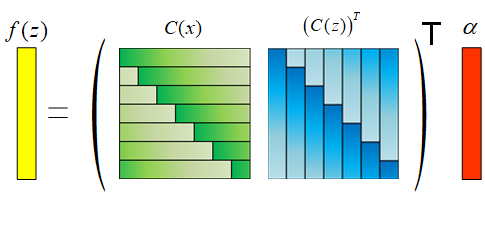
逐个样本z进行检测太慢了,我们把z也扩展成循环矩阵C(z),然后就可以直接做一批样本的检测,这一批样本相互之间是空间上的位移关系,最后得到f(z)是一个列向量,表示一批样本的检测结果。
在没有引入核函数的情况下,上面的C(z)和(C(x))T相乘得到的也是一个循环矩阵。引入核函数之后,每个样本都经过φ(x)映射到高维空间。我们把高维空间的C′(z)和(C′(x))T相乘的结果记作Kz
Kz=C(kzx)kzx=[κ(z,P0x)κ(z,P1x)κ(z,P2x)⋯κ(z,Pnx)]
把结果用循环矩阵化简:
f(z)=C(z)(C(x))Tα=Kzα=C(kzx)α=Udiag(k^zx)U∗α
U∗f(z)=diag(k^zx)U∗α
f^∗(z)=k^zx⊙a^∗
这里的结果和论文中的结果有点不一样,这是因为Kz的表示方式不太一样,原文中用的是f(z)=(Kz)Tα,所以Kz=C(x)(C(z))T
Kz=C(kxz)kxz=[κ(x,P0z)κ(x,P1z)κ(x,P2z)⋯κ(x,Pnz)]
把结果用循环矩阵化简:
f(z)=(Kz)Tα=(C(kxz))Tα=U∗diag(k^xz)Uα
Uf(z)=diag(k^xz)Uα
f^(z)=k^xz⊙a^
这两个结论的区别在于求x和z的互相关时,两个序列的相对滑动方向不一样。结合我的第一篇文章中关于相关运算用DFT加速的内容:
k^zx=z^⊙x^∗
k^xz=x^⊙z^∗
我更倾向于使用后者的结论,那样在没有引入核函数的情况下计算f(z)可以表示为:
f(z)=F−1(x^⊙z^∗⊙α^)
核函数计算
有些核函数的计算也可以利用循环矩阵来加速。
多项式核
κ(u,v)=(uTv+a)b
在训练的时候计算kxx,u和v一个始终是原始样本x,另一个是循环移位的样本。这就是自相关运算,所以可以用DFT来加速。
kixx=κ(x,Pix)=(xTPix+a)b=(F−1(x^⊙x^∗)+a)b
在检测的时候计算kxz。这时候是互相关运算,互相关运算要注意它们相对滑动的方向,然后再确定哪个需要取复共轭。
kixz=κ(z,Pix)=(zTPix+a)b=(F−1(x^⊙z^∗)+a)b
高斯核
κ(u,v)=exp(−σ21∣∣u−v∣∣2)
在训练的时候计算kxx。
kixx=κ(x,Pix)=exp(−σ22(∣∣x∣∣2−F−1(x^⊙x^∗)))
在检测的时候计算kxz。
kixz=κ(x,Pix)=exp(−σ21(∣∣x∣∣2+∣∣z∣∣2−2F−1(x^⊙z^∗)))