目标跟踪文章综述
引言
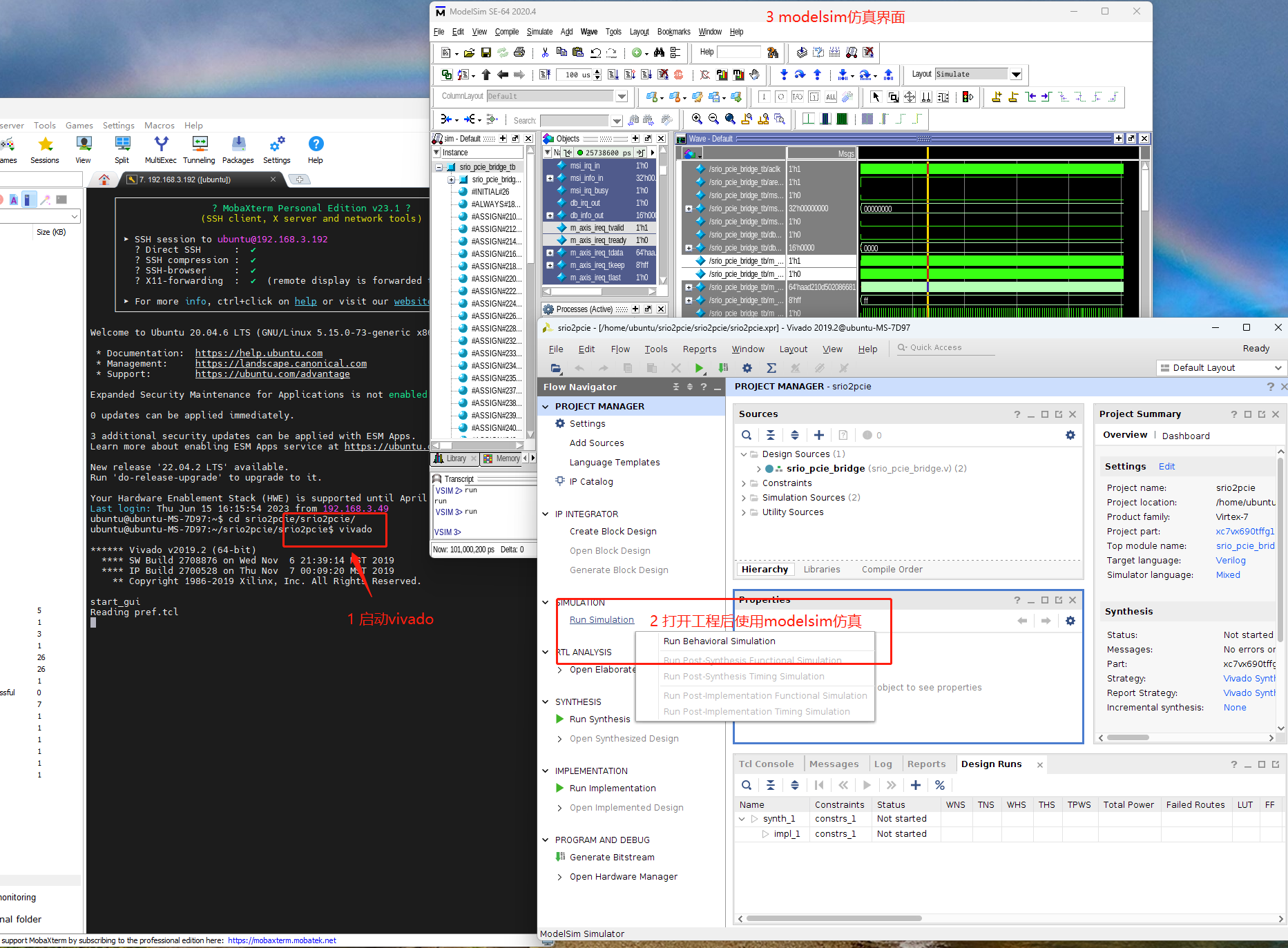
最近刚开始看论文,以前都是看数据手册,参考手册,User Guide, Application Note这类,就没好好看过论文。现在开始入门目标跟踪这一块,希望先熟悉一些算法,然后再去尝试嵌入式平台上的实现。
A Review of Visual Trackers and Analysis of its Application to Mobile Robot,2019年的一片目标跟踪相关的论文综述,大致介绍了目标跟踪算法的发展历程。
笔记
零碎的笔记
传统的目标跟踪算法,主要是用数学公式预测轨迹,而现在的目标跟踪算法则是把检测算法,跟踪策略,更新策略,在线分类等结合在一起,更加复杂。
文章中的表1给出了今年的一些数据集。表2给出了一些常用的特征。
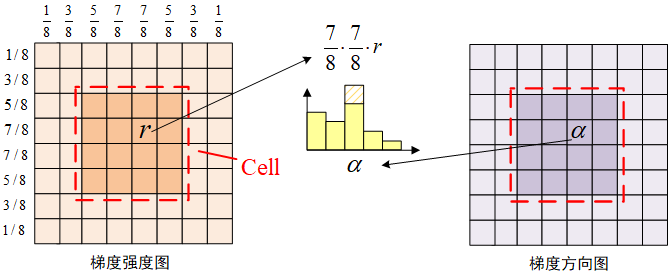
目标跟踪的算法大致分为两种,不管是哪一种,特征提取非常重要!!一种是generative method,生成式方法,建立目标的模型后用模板匹配的方式找目标。另一种是判决式方法,discriminative method,它不生成模型,而是直接用神经网络判断是不是目标或者给出目标的概率。
跟踪的算法以前是用来解决检测速度慢的问题,跟踪可以预测目标下一帧可能的位置。而现在又有了用检测代替跟踪的方式,就是把一段时间内的视频帧用来检测,这就是现在主流的Tracking-by-Detection。主要有两种Tracking-by-Detection的方法,Correlation Filter相关滤波和Deep Learning 深度学习。
相关滤波
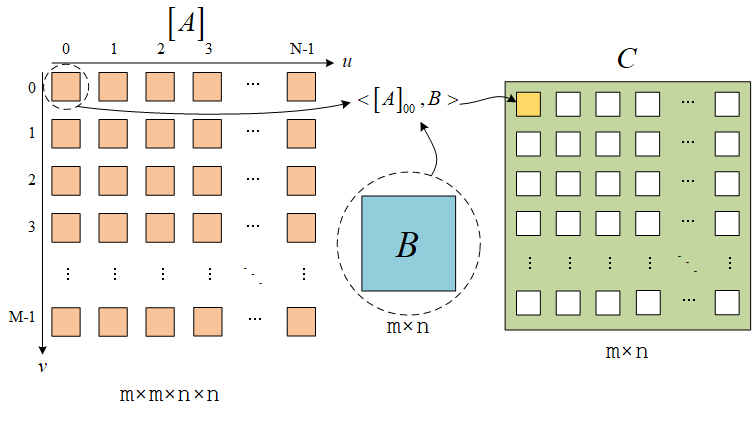
相关滤波CF Correlation Filter,也被称作DCF Discriminative Correlation Filter
| 参考文献序号 | 概要 |
|---|---|
| 118 | 总结了相关滤波的一般架构 |
| 115 | ASEF, Average of Synthetic Exact Filters |
| 116 | MOSSE, Minimum Output Sum of Squared Error Filter |
| 57 | CSK, Circulant Structure of tracking-by-detection with Kernels |
| 119 | MCCF, Multi-Channel Correlation Filter |
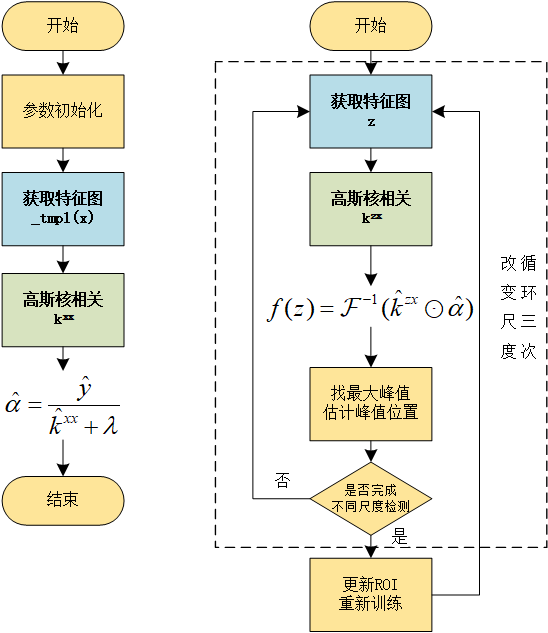
| 117 | KCF, Kernel Correlation Filter |
| 75 | CN, Color Names |
CSK,KCF,CN常常在很多数据集中被当作基准算法
相关滤波的滤波器尺寸如果是固定的,就很难应对目标的尺度变化。为此有人提出了新的一些能够解决尺度变化问题的算法。
| 参考文献序号 | 概要 |
|---|---|
| 62 | DSST HOG 特征 Translation Filter + Scale Filter算得慢 |
| 61 | fDSST PCA降维 |
| 121 | SAMF HOG 和 CN特征 基于KCF,和DSSTA相像 |
| 124 | CFLB 灰度特征 基于MOSSE |
| 125 | BACF HOG特征 基于MOSSE |
| 126 | RCF 基于CF 引入三个稀疏相关损失函数 |
| 127 | MEEM 可以调用多个跟踪器(缝合怪),实时性不好 |
后面的还有好多先不看了,准备去看具体的论文……
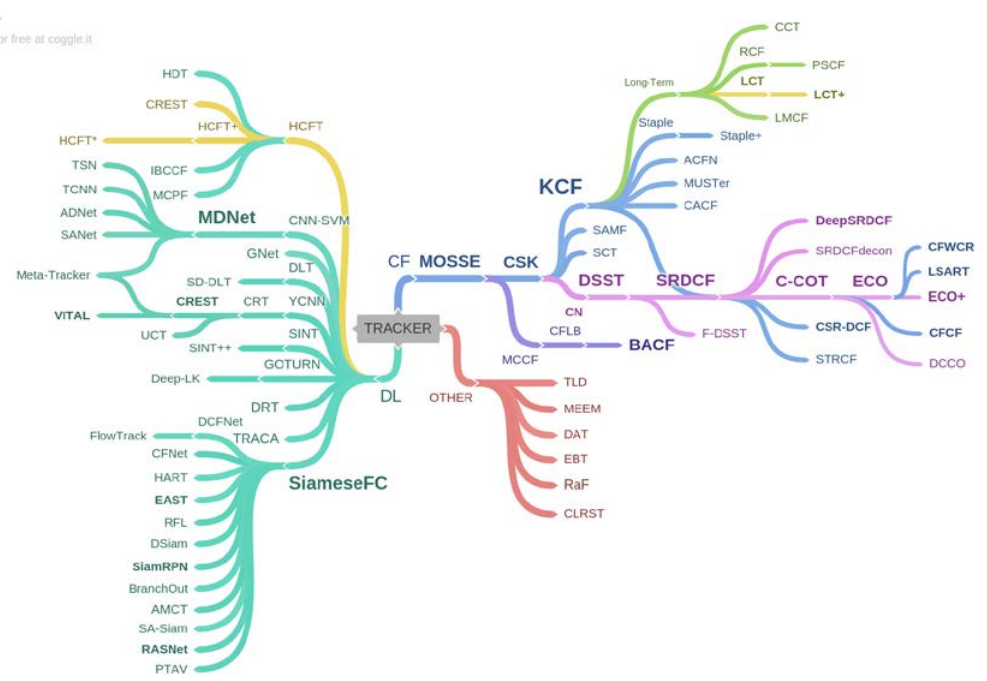
上面这个图是目标跟踪算法整体的发展分支。
等后面看了一些文章之后再来补充……