本文是关于最小二乘问题的一些总结。
问题引入
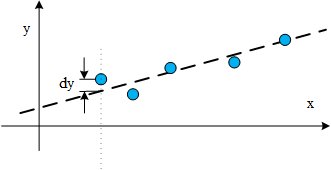
最小二乘法最常见于曲线拟合的问题。比如有一组样本点(x1,y1), (x2,y2), (x3,y3), …, (xm,ym)。每个样本点的x都是n-1维列向量。然后根据用户定义的模型可以列出m个方程组成的方程组来求解模型中的参数。
以x∈C3为例,每个样本是3维的数据,共5组样本数据,列出一次多项式方程组,求解n个参数a,b,c,d:
⎩⎨⎧ax11+bx12+cx13+d=y1ax21+bx22+cx23+d=y2ax31+bx32+cx33+d=y3ax41+bx42+cx43+d=y4ax51+bx52+cx53+d=y5
也可以采用更加复杂的模型,例如:
⎩⎨⎧aex11+x12b+clnx13+d=y1aex21+x22b+clnx23+d=y2aex31+x32b+clnx33+d=y3aex41+x42b+clnx43+d=y4aex51+x52b+clnx53+d=y5
求解的时候所有的样本点都是会代入方程组中的,所以只要待求的参数最后能组成线性的方程组就行。
在线性代数中我们学过线性方程组解的结构。
⎣⎡x11x21x31x41x51x12x22x32x42x52x13x23x33x43x5311111⎦⎤⎣⎡abcd⎦⎤=A⎣⎡abcd⎦⎤=⎣⎡y1y2y3y4⎦⎤
可以把前面的第一个方程组写成矩阵的形式,系数用矩阵A表示,A的秩rank(A)如果小于n(n是参数的个数),那么就有无穷解;rank(A)=n,则有唯一解;rank(A)>n则无解。这和我们熟知的,要解n个变量,就需要n个方程是一个道理。
最小二乘法主要用在“无解”的情况,在实际应用中,采集大量样本数据后,往往是得不到唯一解的。但我们想要得到一个曲线能最好地描述这一批数据,最小二乘法就是能得到令估计误差的平方和最小的一种估计方法。
而最佳体现在哪里?一般很少会有人提到最佳的最小二乘解是因为在“无解”的情况下,最小二乘解是唯一的,而只有在“无穷解”的情况下才有“最佳”的说法。而在“无穷解”的情况下相当于是在用极少的样本估计模型的参数,这在实际应用中一般也是没有意义的,所以“最佳”这个概念基本没人提。
问题的数学描述
目标函数可以这样表示:
ωargmin∥Xω−Y∥22
ω是一个n维的列向量,是我们需要估计的参数。X是一个m×n的矩阵,每一行对应一个样本数据,共m行,也就是说有m个方程;Y是每个样本的标签值组成的m×1的列向量。
几何意义就是样本点与估计的曲线的偏差dy越小越好,目标函数取的是误差向量的二范数,忽略了偏差的正负。
解析推导
我之前在关于CSK与KCF算法推导(二)中写了岭回归的推导,岭回归就是在最小二乘的基础上加上了正则项,保证了ω一定有解。这里的推导和岭回归几乎一致。
类似二次多项式求最小值的问题,目标函数对ω求偏导,令其偏导为零向量即可求出ω在什么情况下能令目标函数最小化。
∂ω∂∥Xω−Y∥22=0
将目标函数展开,向量二范数的平方就是向量内积:
∥Xω−Y∥22=(Xω−Y)T(Xω−Y)=ωTXTXω−ωTXTY−YTXω+YTY
每一项分别对ω求偏导:
∂ω∂ωTXTXω=XTXω+(ωTXTX)T=2XTXω
∂ω∂ωTXTY=XTY
∂ω∂YTXω=(YTX)=XTY
∂ω∂YTY=0
整合起来令偏导为零向量:
2(XTXω−XTY)=0
也就是:
XTXω=XTY
如果没有额外的条件的话是无法保证XTX可逆的,如果XTX可逆,那么:
ω=(XTX)−1XTY
XTX可逆也不难,只要X是列满秩的就行。X是m×n的矩阵,一般情况下样本个数m远大与待求的变量个数n时,X列满秩是很容易满足的。
从正交投影矩阵的角度推导
参考了华中科技大学出版社的《矩阵论》(第二版)教材,书中关于最佳的最小二乘解的内容得从M-P广义逆开始说起。求最佳的最小二乘解是M-P广义逆的一个应用,想要详细了解的小伙伴建议直接看书,我这里写的东西难免有些不严谨的地方,而且没法真正地把这个思路讲明白。书中的结论是更加一般化的,前面的推导的结果是其中的一个特例。
M-P广义逆
书中介绍了M-P广义逆的一些性质,这里就不写了,主要提一下怎么计算M-P广义逆。任意矩阵A∈Cm×n都存在M-P广义逆A+。先对A进行满秩分解,
A=BC,B∈Cm×r,C∈Cr×n,rank(B)=rank(C)=r
M-P广义逆就可以表示为,
A+=CH(CCH)−1(BHB)−1BH
特别的,当A为列满秩的矩阵时,C=Ir×r,
A+=(AHA)−1AH
正交投影矩阵
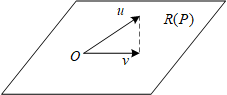
正交投影矩阵P满足:P2=P,PH=P。正交投影矩阵有什么用呢?假如P∈Cn×n,是一个正交投影矩阵,
v=Pu,u∈Cn×1,v∈Cn×1
u经过P变换以后可以得到一个R(P)空间中的一个向量v,
∥v−u∥2≤∥x−u∥2,∀x∈R(P)
向量v与u之间的欧式距离小于R(P)空间中的任何向量x
考察矩阵AA+和矩阵A+A可以发现它们都是正交投影矩阵。书中有证明R(AA+)=R(A),这为我们带来了很大的方便。如果我们想把向量x正交投影到R(A)空间,只需要计算AA+x就行了。
回到问题
ωargmin∥Xω−Y∥22
再回到原来的问题,我们想找的就是Xω如果能是Y在R(X)空间中的正交投影就好了,前面的结论就告诉了我们XX+Y就是Y在R(X)空间中的正交投影。那么自然,
ω=X+Y
与前面的解析推导不一样的地方是,这里没有对X的形式做限制。如果同样加上X是列满秩的限制,那么可以得到与前面一样的结论。
ω=(XTX)−1XTY
ω=X+Y是一个更加一般的结论,它被称为“最佳的最小二乘解”。这个解不光满足最小二乘,而且这个解本身的二范数也是最小的,所以是所有最小二乘解中最佳的解。而“最佳”也只会在有无穷解的情况下体现,下面举个最简单的例子。
举例
用样本点(1,2)拟合一条直线,y=ax+b。
[11][ab]=2
X=[11],X+=XT(XXT)−1=[0.50.5]
最佳的最小二乘解:
[ab]=X+Y=[11]
过点(1,2)的直线有无数条,这无数条直线的参数a,b都是这一问题的最小二乘解,它们都能令Xω−Y=0,而这些解中a=1,b=1是最佳的,因为此时a2+b2最小。